FANUC R-30iB Mate
通常は装置の一部としてロボットはPLCなど外部から「うごいていいよ~」という信号(IMSTP,HOLD,SFSPD,ENBLがオンの信号)をもらうと動けるようになるんですが、装置を組み立てる前にロボット単体で動かしたい、なんてことは多々あります。
そうした時は、システム→システム設定で
「専用外部信号」
を無効にすると動けるようになります。
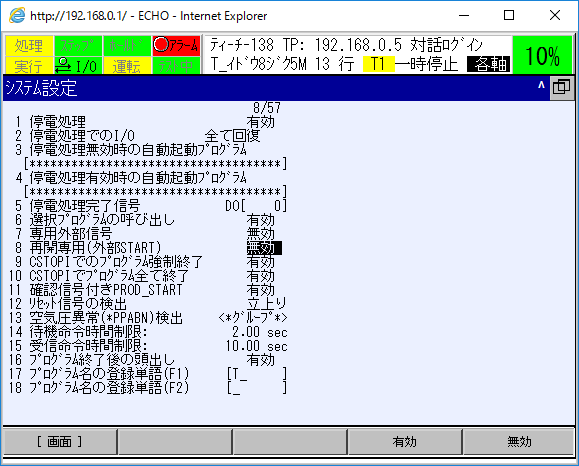
装置が組みあがったら有効に戻さないと危ないので注意してください。
 R-30iB Mate
R-30iB MateFANUC R-30iB Mate
通常は装置の一部としてロボットはPLCなど外部から「うごいていいよ~」という信号(IMSTP,HOLD,SFSPD,ENBLがオンの信号)をもらうと動けるようになるんですが、装置を組み立てる前にロボット単体で動かしたい、なんてことは多々あります。
そうした時は、システム→システム設定で
「専用外部信号」
を無効にすると動けるようになります。
装置が組みあがったら有効に戻さないと危ないので注意してください。


コメント