 iRVision
iRVision ビジョンのコツ その1 まずは検出面Z高さで調整
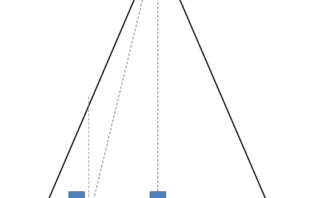
カメラで撮影して散らばっているワークを拾いに行く、なんてことは良くあるケースだと思います。ワークがある程度大きいものであれば特に気にすることはないのですが、10mm以下の小さなワークですとちょっとしたズレでワークを拾えなかったりします。そん...
iRVision  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate 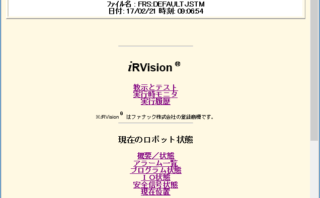 R-30iB Mate
R-30iB Mate  未分類
未分類