①PCにオムロンのCX-Compoletをインストールする
インストールについての説明は省略します。
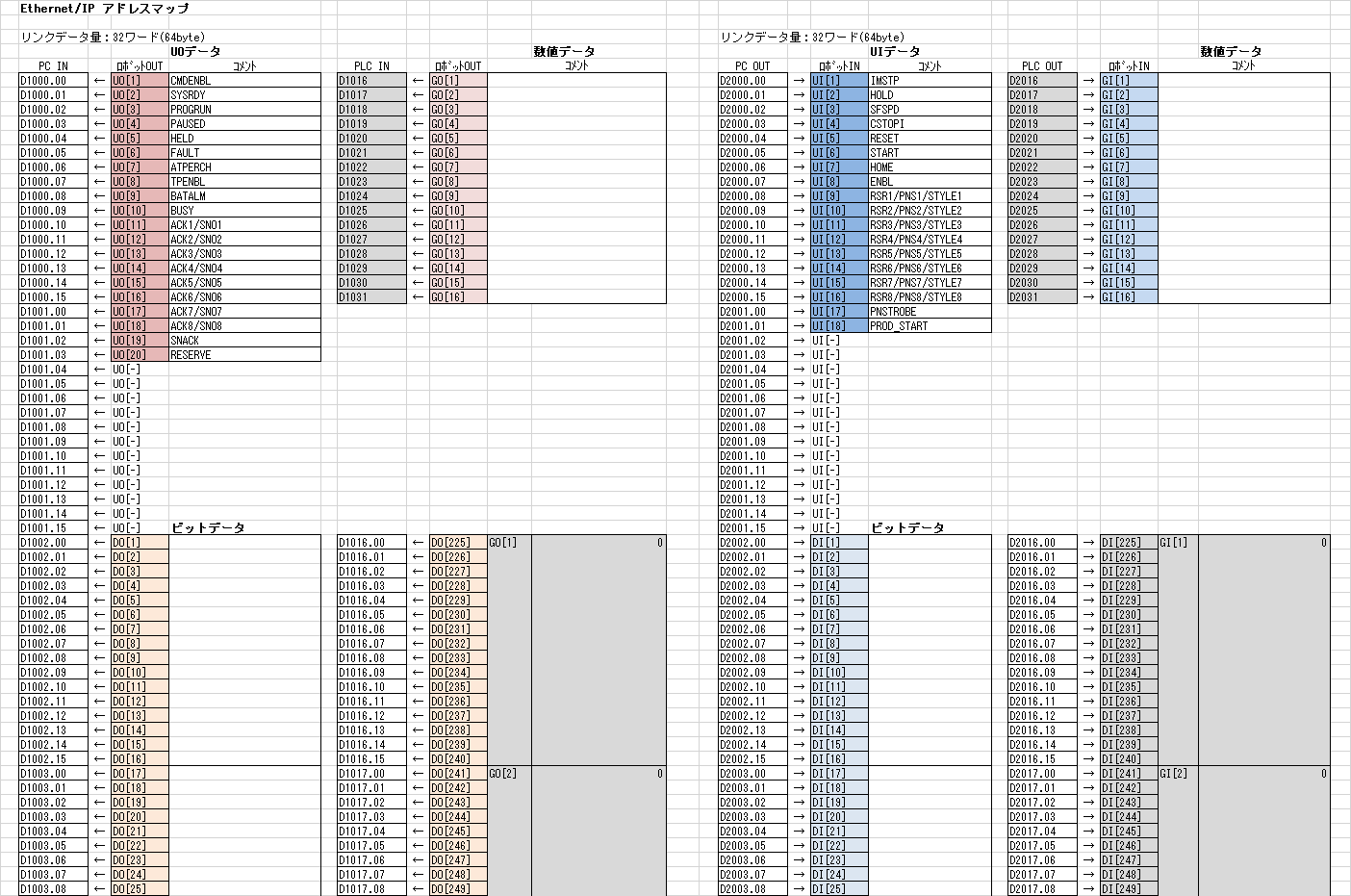
②データリンクさせるデータのアドレスを決める
ロボットとPCを通信させるのですが、どのくらいの量のデータをデータリンクさせるかを考えます。とりあえず今回は、入力と出力を64byteずつデータリンクするように定義しました。エクセルにまとめておくとわかりやすいです。通信する先頭をUI,UOに割り当て、あとは、切の良いアドレスからDI,DOに割り当てました。また、後半の32byteは数値として扱えるようにGI,GOにも割り当てることにしました。
③SYSMAC Gateway Consoleでタグテーブルを定義
CX-Compoletのインストールを完了すると「SYSMAC Gateway Console」というソフトがインストールされるので、それを起動します。
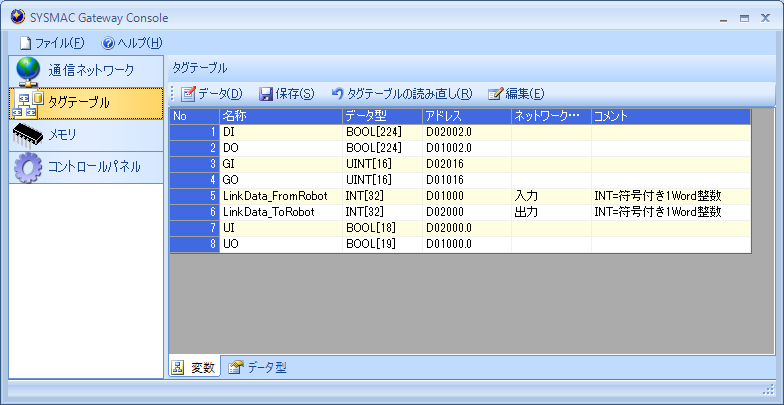
この中で注目したいのは、LinkData_FromRobotとLinkData_ToRobotです。この二つのタグでEtherNet/IPタグ通信をして受信と送信を行うようにさせます。あとほかの定義は、自作のソフトからそのデータを読み書きする際、呼出しやすいように定義しました。

コメント