⑤ロボットのTPでEtherNet/IPの設定とIO割付の設定をする
ここからはロボットのティーチングペンダントを操作します。
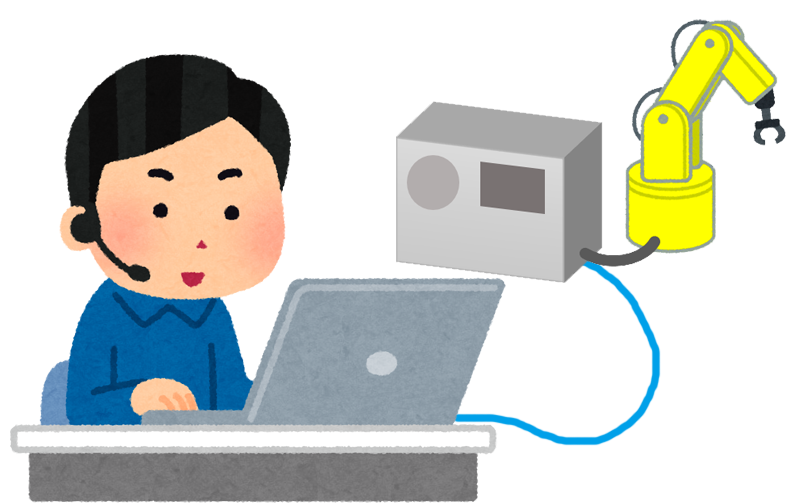
画面選択→I/O→イーサネット/IP→Connection1→設定 で入力サイズと出力サイズを32ワード(64byte)にします。スキャナIPはPCのIPになりますが、特に設定しなくても大丈夫です。
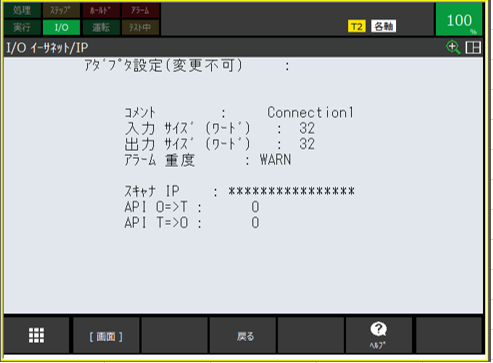
UI,UO,DI,DOの割付を次のようにします。DOの開始点33はD1000.00を1番目としてD1002.00が33番目ということで33になります。DIも同様です。
さらに、GI,GOの割付設定を次のようにします。こちらの開始点もDI,DOと同じ原理になります。

これで割付設定は完了です。
あとはシステム設定で「専用外部信号」を有効にすればEtherNet/IPの信号で制御できるようになります。
⑥VisualStudioでボタンやランプを作ってCX-Compoletでオンオフ制御させロボットを制御する
最後に、VisualStudioでボタンやランプを配置し、ロボットのIOを制御できるようにします。今回は次のような画面を作成して、UI,UO,DI,DO,GI,GOを操作したり状態を表示できるようにしました。
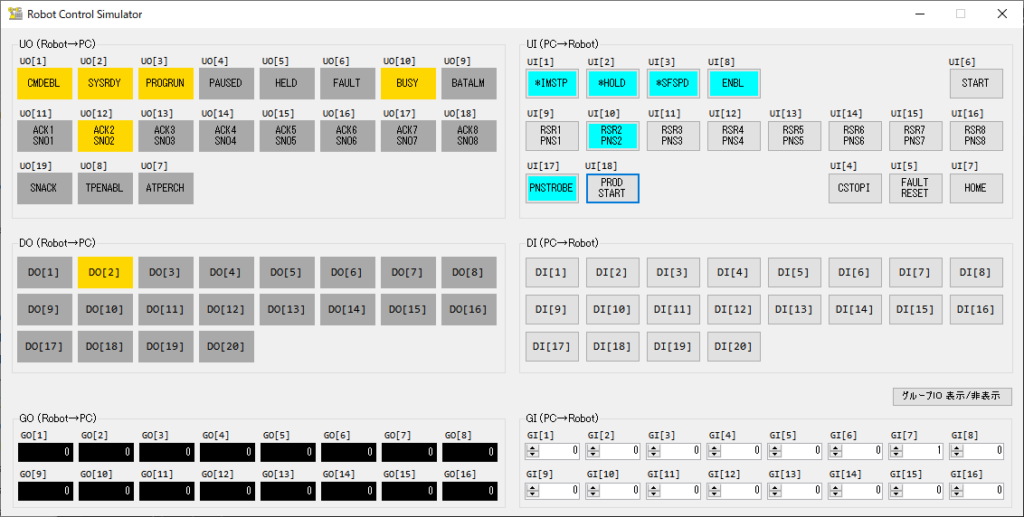
これで、PCからロボットを制御することができました。

コメント