 R-30iB Mate
R-30iB Mate R-30iB ロボット コントローラの種類
R-30iBのロボットコントローラにはAキャビネット、Bキャビネット、Mate標準型、Mate外気導入型、コンパクトなどある。ロボットによって選べるコントローラが変わってきます。 A-キャビネット、B-キャビネット 大型のロボット用のコント...
R-30iB Mate  ロボットプログラミング
ロボットプログラミング  R-30iB Mate Plus
R-30iB Mate Plus  R-30iB Mate Plus
R-30iB Mate Plus 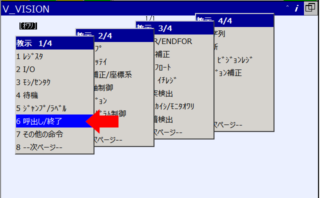 iRVision
iRVision  iRVision
iRVision  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate  iRVision
iRVision