Inertia Calculator in Japanese
Blog Post in Japanese
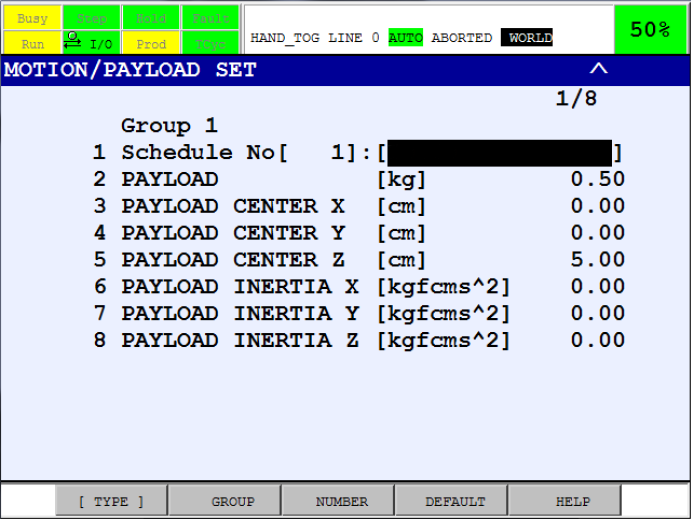
Do you input Payload Inertia Values in Payload Setup? Payload Inertia is especially important for Collaborative Robot. This Page calculates by approximating the robot hand to a rectangular or a cylinder parallelepiped.
Rectangular
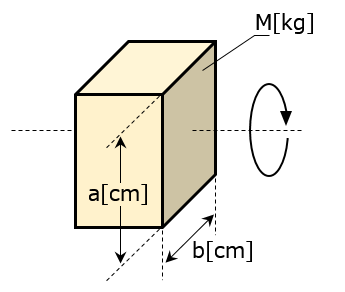
M [kg]
a [cm]
b [cm]
Inertia[kgfcms^2]
Cylinder (Vertical direction)
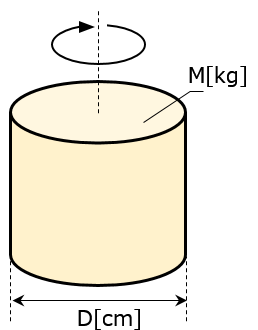
M [kg]
D [cm]
Inertia[kgfcms^2]
Cylinder (Holizontal direction)
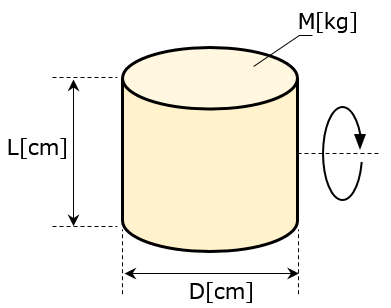
M [kg]
D [cm]
L [cm]
Inertia[kgfcms^2]