動作性能/負荷設定のイナーシャを計算します。ロボットハンドを直方体か円柱に見立て近い方を選んでください。計算の値が間違っているようでしたら、コメント欄にご指摘お願いします。物理が得意な人にホント確認していただきたいです。実際の入力例は↓「イナーシャの入力してますか?」で解説しています。
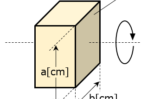
直方体
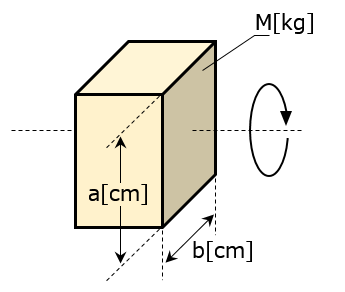
M [kg]
a [cm]
b [cm]
イナーシャ[kgfcms^2]
円柱(縦方向)
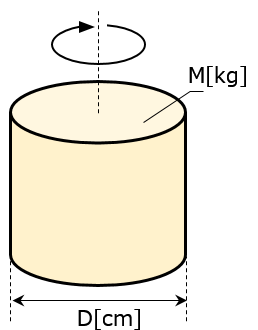
M [kg]
D [cm]
イナーシャ[kgfcms^2]
円柱(横方向)
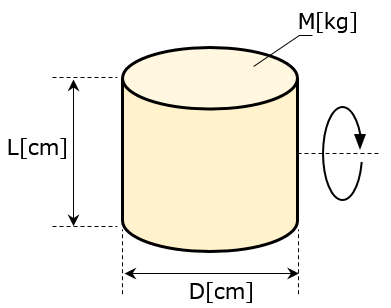
M [kg]
D [cm]
L [cm]
イナーシャ[kgfcms^2]
コメント
物理わからないので参考値を計算するのに使わせていただいています。