そういえば、ファナックの6軸ロボットの電池をしばらく換えてなかったなぁと思い出し、
ロボットの電源入れて電池交換するまでは良かったのですが、
再起動していざ動かしてみようとしたところ、「サーボ-062 BZAL アラーム」が発生。
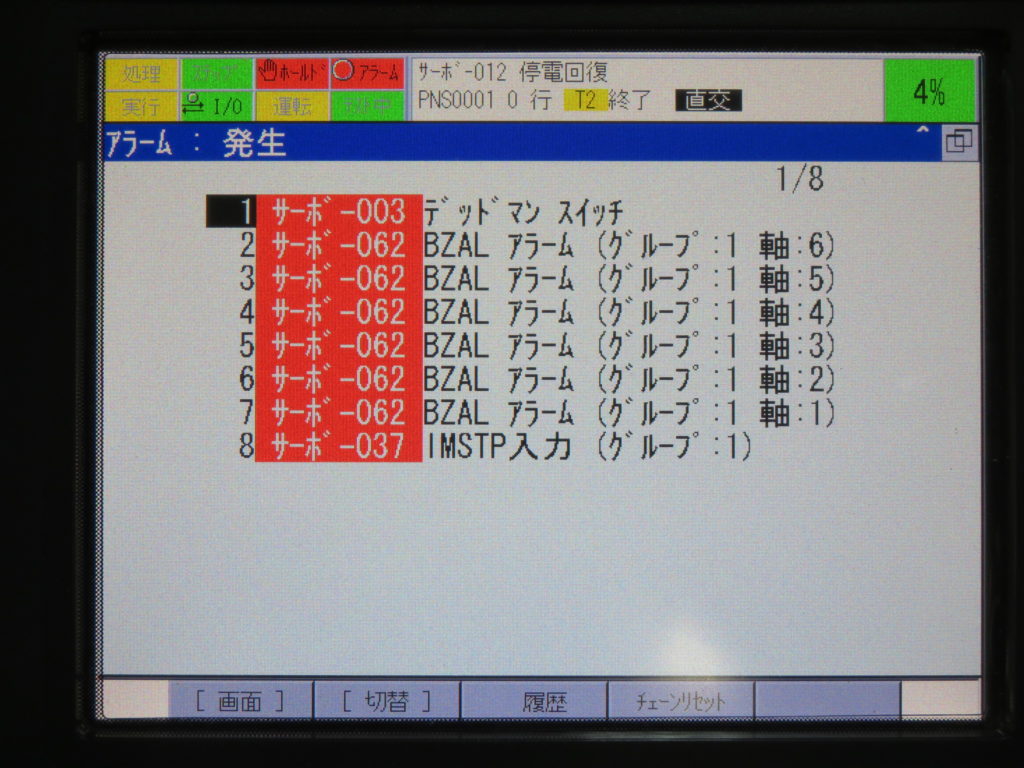
これ、ヤバいやつじゃ?…。
BZALはバッテリーゼロアラームのことで、位置データが失われマスタリングが必要らしいです。
こうなるとロボットはうんともすんとも動いてくれません。
一番良いのは、この時点でメーカーの人を呼んで直してもらうのが良いと思います。
ただ、お金と時間が必要です。
すぐにでも直したい!自分でやろう!というひとは以下、自己責任でお願いします。
取説を見るとマスタリングといってもいくつかの種類があるようです。
・治具位置マスタリング
・ゼロ位置マスタリング
・簡易マスタリング
・簡易マスタリング(1軸)
・1軸マスタリング
・マスタリングデータの入力
治具位置マスタリングは工場出荷前に行われる特殊なやつなので出来ません。
今回の場合、6軸全部アラームが出ているので、ゼロ位置マスタリングか簡易マスタリングになります。
ゼロ位置マスタリングは、各軸をゼロ位置マーク(合いマーク)に目視で合わせてえいやと合わせるので正確なマスタリングは期待できず応急的な対処だそうです。
実際に昔やったことありますが、ゼロ位置マスタリングは、とりあえず動くけど、直交でXやY方向に直線に動かそうとしても、直線には動かず蛇行したりした経験があります。
一方、簡易マスタリングの説明を見ると、「ユーザが設定した任意の位置で行うマスタリングです」という一文がありますが、これは一端無視して、「簡易マスタリングは、1回転以内の回転角度の絶対値が失われないことを利用しています。」とあります。ゼロ位置マスタリングでは応急的な対処に対して、簡易マスタリングは正確にもどってくれそうな予感がします。
よくよく読み進めてみると、最初の一文の「ユーザが設定した任意の位置で行うマスタリングです」は間違いで、「ユーザが設定した任意の位置でも行うことができるマスタリングです」が正解ということがわかりました。
つまり、ユーザが設定しなければ、ゼロ位置マスタリングと同様、ゼロ位置がマスタリングする位置のようです。
装置に組込んで障害物がありゼロ位置に持っていけないという場合のために、ゼロ位置の代わりにユーザが設定した位置をあらかじめ簡易マスタリングの参照点として設定できるようになっているようです。
ということで、前振りが長くなりましたが、次ページからは「簡易マスタリング」を実際に行ってみた覚書きになります。

コメント