ということで、前振りが長くなりましたが、ここからは「簡易マスタリング」を実際に行ってみた覚書きになります。
①パルスリセット
まずは、アラームをなくさなければなんもできないので、パルスリセットをしてアラームを消します。
メニューからシステム→システム変数画面で$MCR.$SPC_RESETにカーソルを合わせ、F4 TRUEを押します。
一瞬TRUEとなり、直ぐにFALSEに書き換わります。
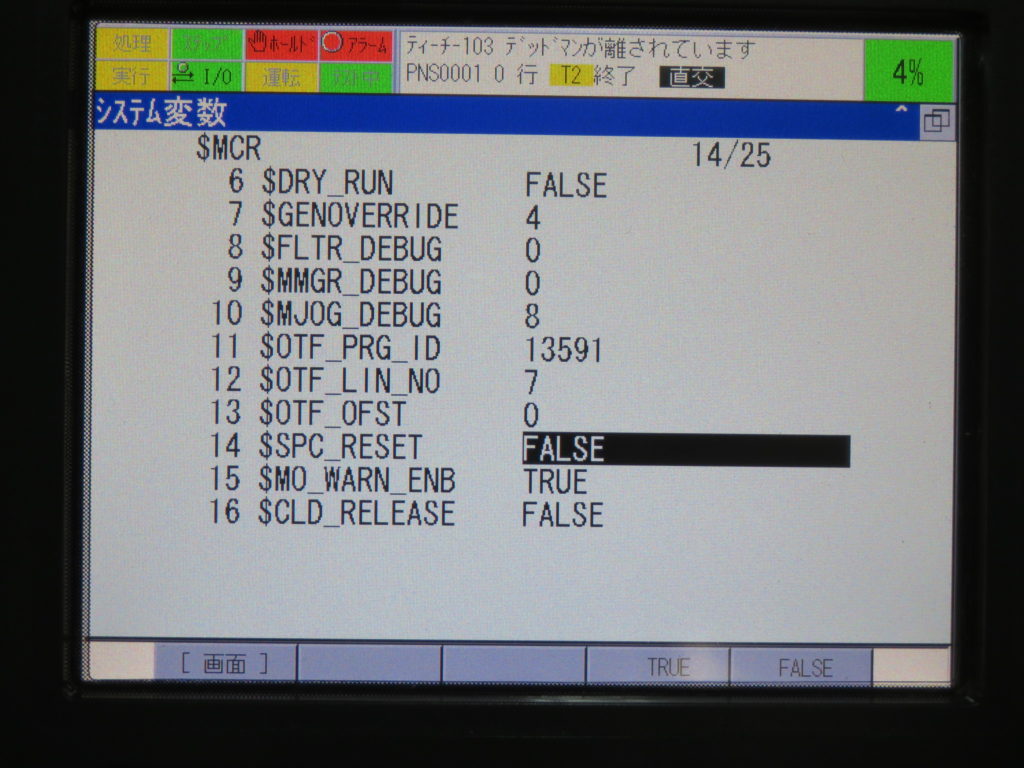
アラーム解除ボタンを押すと、「サーボ-062 BZAL アラーム」が消え、各軸操作で動かせるようになります。まだ直交では動かせません。
この時点で、アラームが消えなかった場合は、電源を入れ直します。
(パルスリセットはメニューからシステム→位置合わせの画面でF3 パルスリセットを押し、次いでF4 はい でも同様のことができるようです。)
②各軸をゼロ位置に合わせる
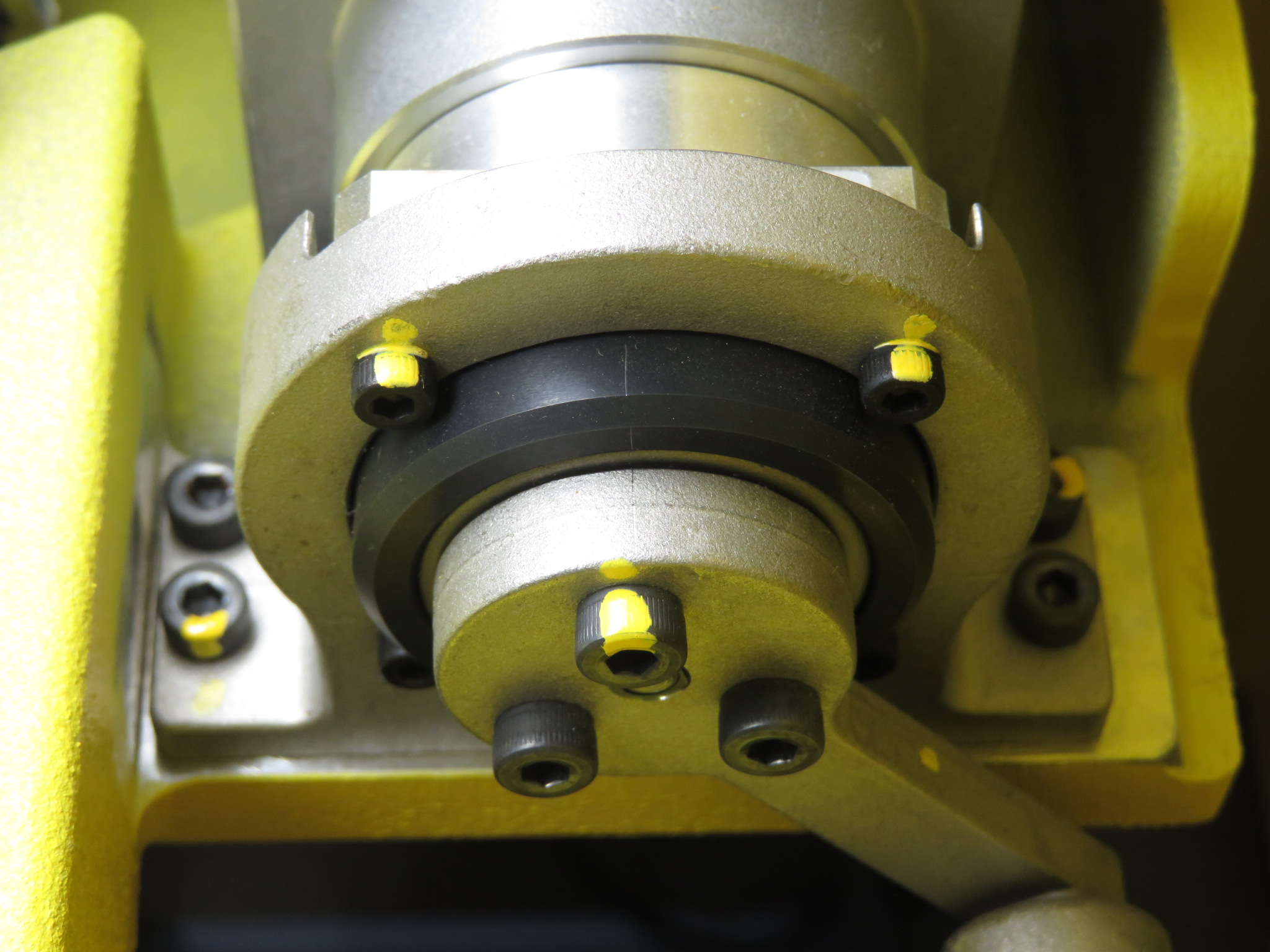
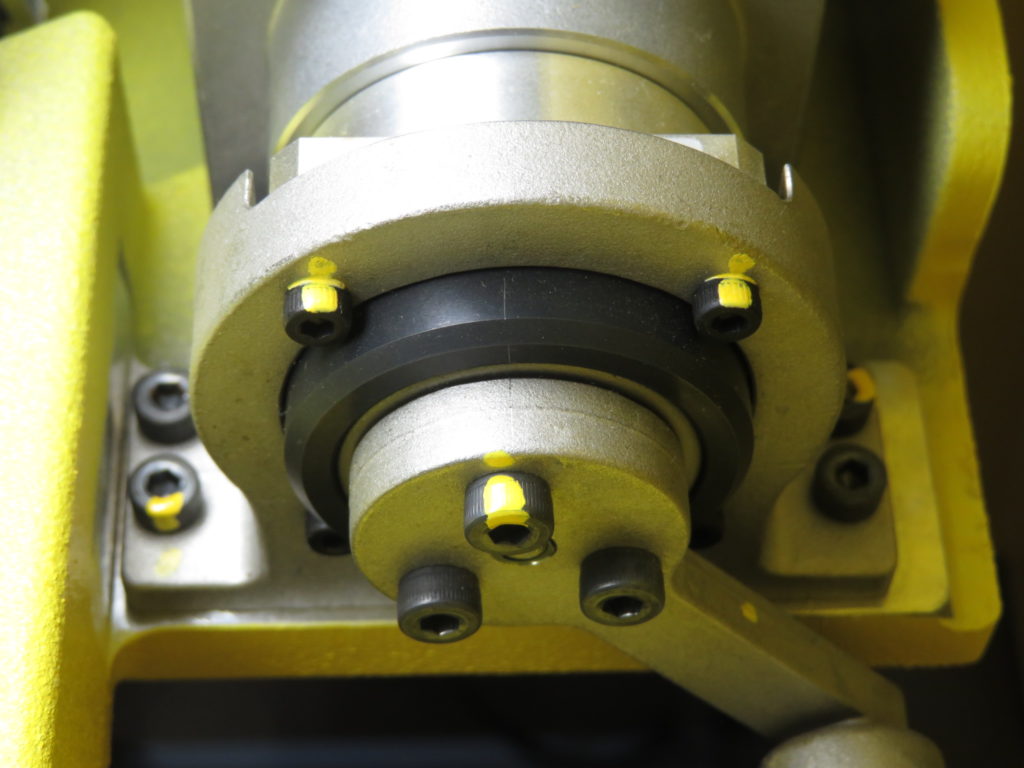
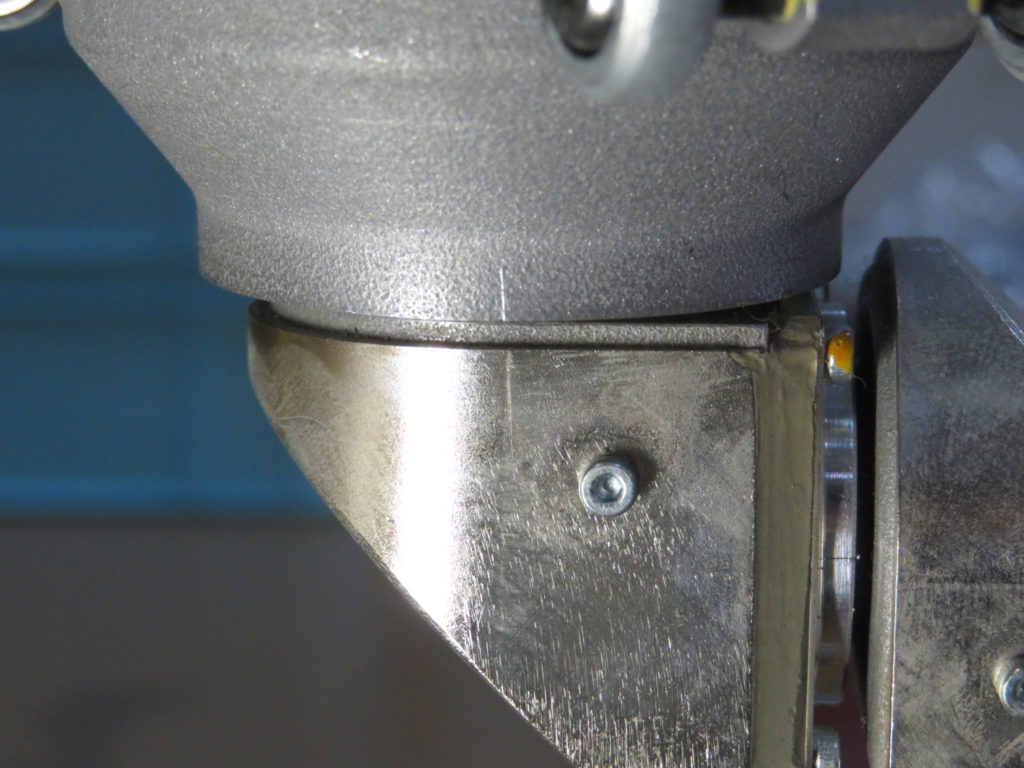
ティーチングペンダントで、各軸をゼロ位置マーク(合いマーク)のケガキ線を合わせます。
合いマークの位置はそれぞれのロボットの機構部の取扱説明書に載っています。
今回はM-1iAのゲンコツロボットだったので、次の写真ようなケガキ線を6軸すべて合わせました。
合いマークのケガキ線は非常に細いので良く見ないと分かりません。
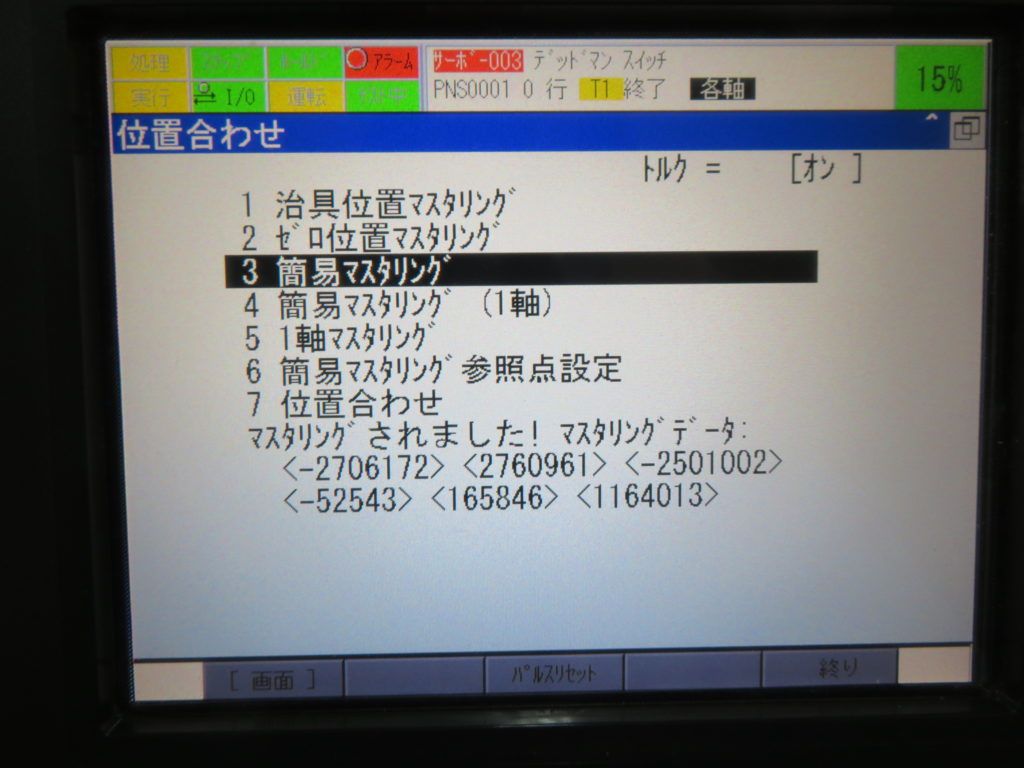
③簡易マスタリング
メニューからシステム→位置合わせ→簡易マスタリングに合わせ入力キーを押します。
簡易マスタリング?と聞いてくるのでF4 はい を選択します。
マスタリングされました!と表示されます。
④位置合わせ
つづいて、位置合わせにカーソルを合わせ、入力キーを押します。
位置合わせをしますか?と聞いてくるのでF4 はい を選択します。
位置合わせ完了!と表示されます。
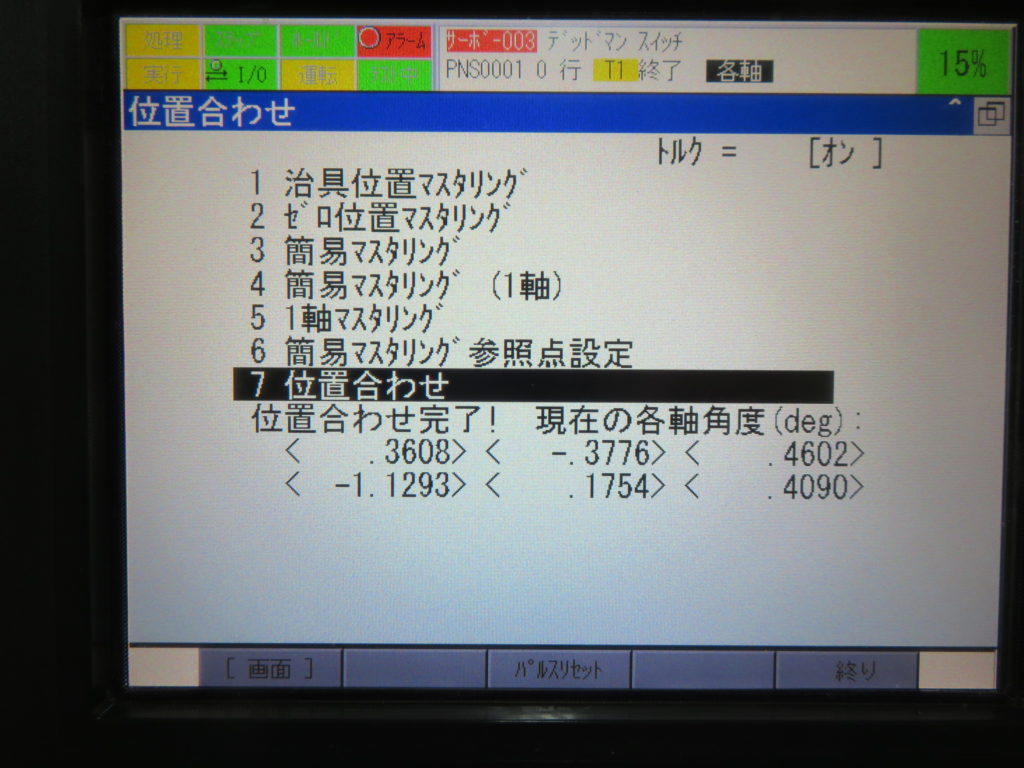
これで簡易マスタリングは完了です。
なにはともあれ、なんとか正常に戻ったようです。
どうでしょう?皆さんの相棒も無事に回復できたでしょうか?
教訓「電池は定期的に交換しましょう」でした。

コメント