Windowsのパソコン(以下PC)の画面上のボタンを押すと、ファナックのロボットが起動するみたいなことができないかという問い合わせをいただいたので、実験を兼ねてやってみました。
今回行った方法は、EtherNet/IP通信を使ってPCとファナックのロボットを通信させる方法になります。(CRMA15、16のIOを使って制御させるなど、ほかにもやり方はあるかもしれませんが、別途機器が必要になるので今回はやめました。)
以前の記事にも登場しましたが、PC側に「オムロン CX-Compolet (amazon link)」というソフトを入れ、それを使ってPCをEtherNet/IPスキャナとして通信します。CX-Compoletにはオムロンの公式サイトにお試し版があるので無料で試してみることも可能です。また、ロボット側にはEtherNet/IPの通信をさせるために、「EtherNet/IP(アダプタ)」のオプションソフトが必要になってきます。
全体の流れとしては、
①PCにオムロンのCX-Compoletをインストールする
②データリンクさせるデータのアドレスを決める
③SYSMAC Gateway Consoleでタグテーブルを定義
④Network Configuratorでデータリンクの設定をし設定情報を流し込む
⑤ロボットのTPでEtherNet/IPの設定とIO割付の設定をする
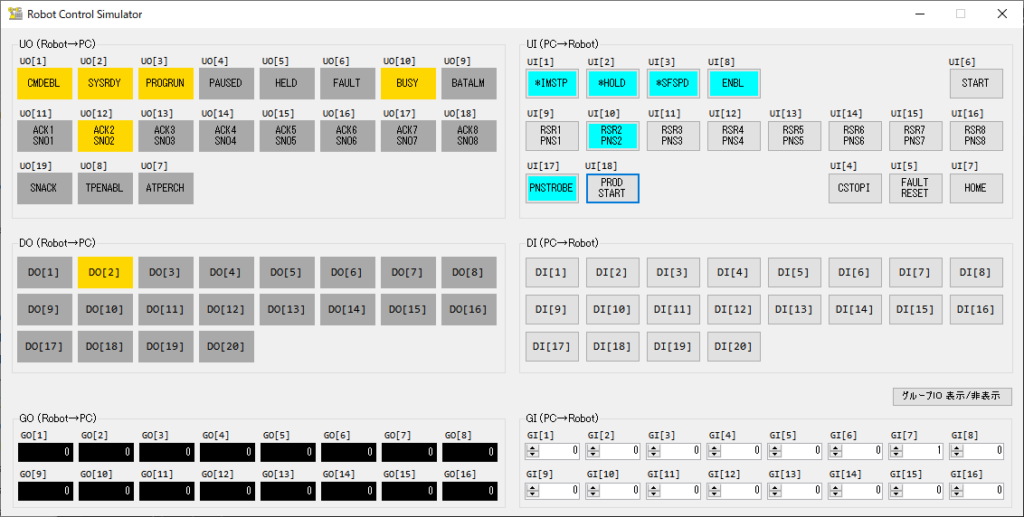
⑥VisualStudioでボタンやランプを作ってCX-Compoletでオンオフ制御させロボットを制御する
(今回はC#を使用しました)
次ページより手順にそって解説していきます。

コメント