ファナックのロボットにおいて、立ち上げ時にロボットハンド(ツール)の重さをシステムの動作性能の画面で入力しますが、その画面の下の方の値もちゃんと入力していますか?重心の位置は、まぁわからなくないですが、イナーシャってなんでしょう。いつも見て見ぬふりして0のまま使ったり…。私もそうでした。そこで今回は重い腰を上げて、このイナーシャに切り込んでいこうと思います。特に協働ロボットではこのイナーシャを加味して接触停止の判定をしているとかしていないとか、とにかく重要なパラメータらしいです。

イナーシャとは、日本語では慣性モーメントといい、「ある軸の周りに回転運動する物体が同じ回転運動を保ち続けようとする回転の慣性の大きさを表す量」だそうです。例えば、長い竹竿を軸に沿ってころころと回すのは簡単だけど、バトンを回すようにブンブンと回転させるには力が必要で大変です。また、一度回りだしたのを止めようとするのも大変です。このように、回しづらさ、止めづらさを数値に表したのがイナーシャだと思ってください。
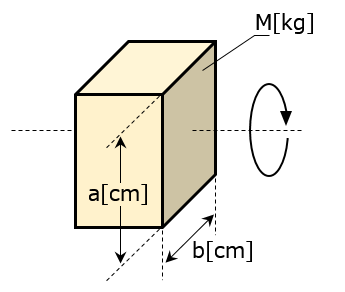
で、実際、動作性能のイナーシャの項目にはどんな値を入力したらよいかですが、ネット上を色々と調べておそらくこの計算で良いであろうというところにたどり着いたので計算機を作ってみました。ロボットハンドを直方体か円柱に見立てて、重さや長さを入力しイナーシャの計算を行います。とりあえずやってみる方は次のボタンをクリックして試してみてください。
具体的な例になります(実際こんな形のロボットハンドはないと思いますが)。直方体に吸着パッドがついているハンドがあったとします。縦横の長さと重さを先ほどのイナーシャ計算機に入力するとイナーシャの値が計算されます。
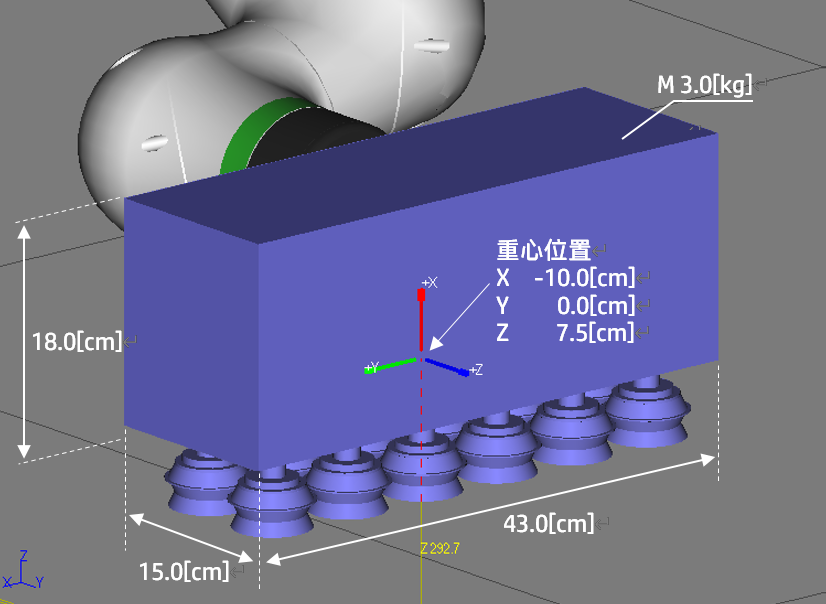
まず「負荷のイナーシャX」は、今回の例ではX軸は上下方向の軸なので、aを43cm、bを15cm、Mを3kgと計算機に入力して計算させます。
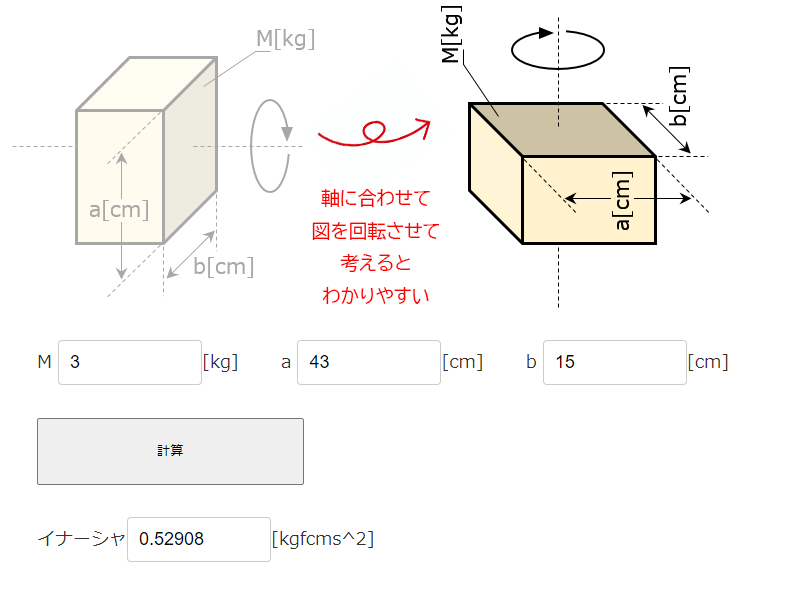
同様にして、Y軸、Z軸も計算させると次のようになりま
さらに、円柱に先端にチャックがあるような形のハンドがあった場合、円柱の計算機にかけると次のようになります。
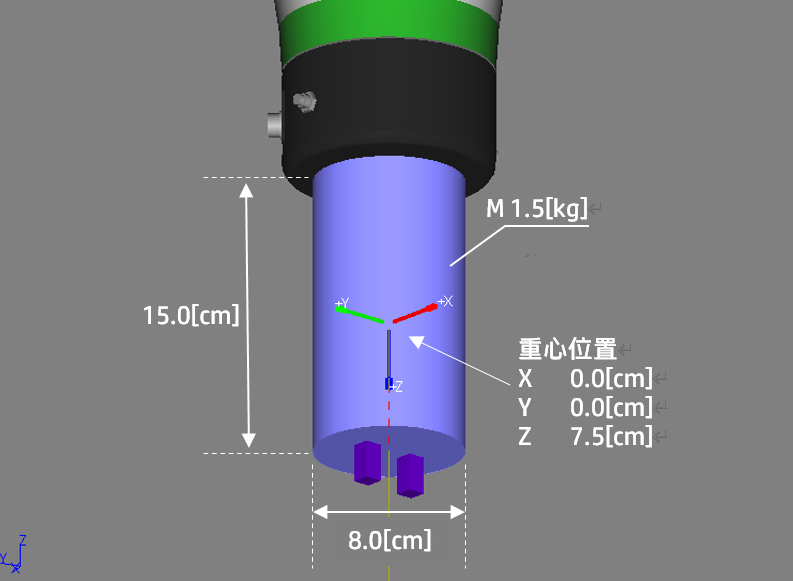
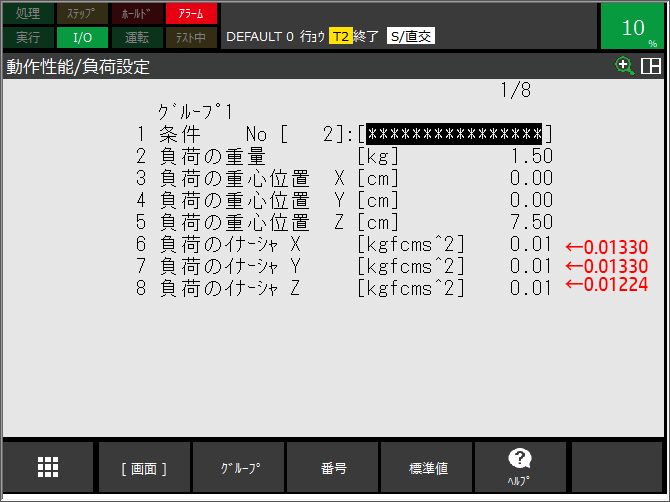
イナーシャX、Y、Zの全てが画面の表示桁数の関係上0.01と表示されていますが、計算値としては赤字の数値になります。
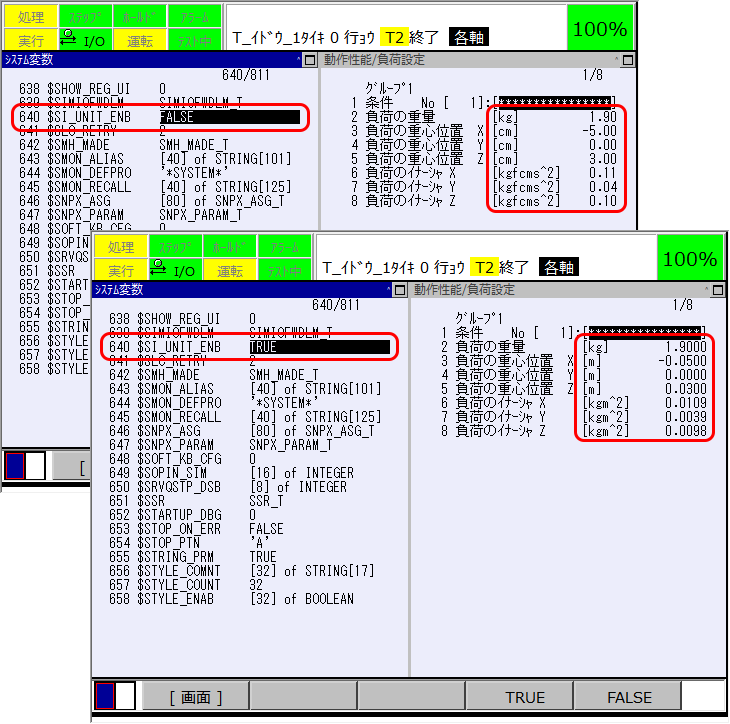
余談。ここの動作性能の画面ではイナーシャの単位が[kgfcms^2]の珍しい単位になっています。実はこの単位、システム変数の$SI_UNIT_ENBという変数をFALSEからTRUEに変えると、[kgm^2]の単位に変えることができます。3D CADソフトなどでイナーシャの値が[kgm^2]で分かっている場合は、いちいち計算せずともこのシステム変数を変えるだけでそのまま入力ができちゃったりします。

コメント