 PLC
PLC PLCからBrotherのラベルプリンタにラベル印刷
通信方式Brotherのラベルプリンタを装置に組込んでPLCから印刷する方法について忘れないように記事にしておきます。今回使うラベルプリンタは「TD-4550DNWB」ですが、別の機種でもそれほど変わらないのではないでしょうか。後から気づき...
PLC  iRVision
iRVision  PLC
PLC  PLC
PLC  Windows
Windows  Windows
Windows 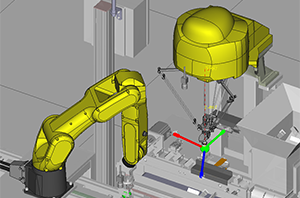 ROBOGUIDE
ROBOGUIDE  ROBOGUIDE
ROBOGUIDE  PLC
PLC  R-30iB Mate
R-30iB Mate