 iRVision
iRVision 行先の位置がロボット動作範囲内か前もって確認する方法(CHK_POS命令)
iRVisonを使ってロボットの動作補正を行うと、ロボットがいざ移動を開始するときになって、動作範囲外のアラームが発生して異常停止しまうことがあります。そうならないように前もって行先の位置にロボットが行けるかチェックする命令が用意されていま...
iRVision  PLC
PLC  PLC
PLC  Windows
Windows  Windows
Windows 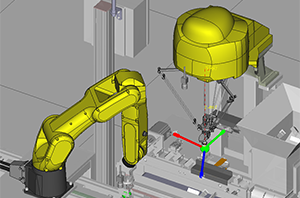 ROBOGUIDE
ROBOGUIDE  ROBOGUIDE
ROBOGUIDE  PLC
PLC  R-30iB Mate
R-30iB Mate  VisualStudio
VisualStudio