 ROBOGUIDE
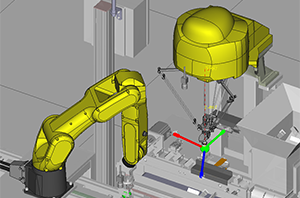
ROBOGUIDE ロボガイド 3D-CAD 取り込み方法
↓の記事で別の方法も紹介していますROBOGUIDE V9についてのお話です。 ロボガイドに取り込めるCADファイルは、・CSB (*.csb)・IGES (*.igs; *.iges)・body.dat (body.dat)・STL (*...
ROBOGUIDE  R-30iB Mate
R-30iB Mate  ロボットプログラミング
ロボットプログラミング  R-30iB Mate Plus
R-30iB Mate Plus  R-30iB Mate Plus
R-30iB Mate Plus 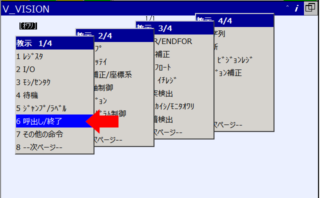 iRVision
iRVision  iRVision
iRVision  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate  R-30iB Mate
R-30iB Mate